
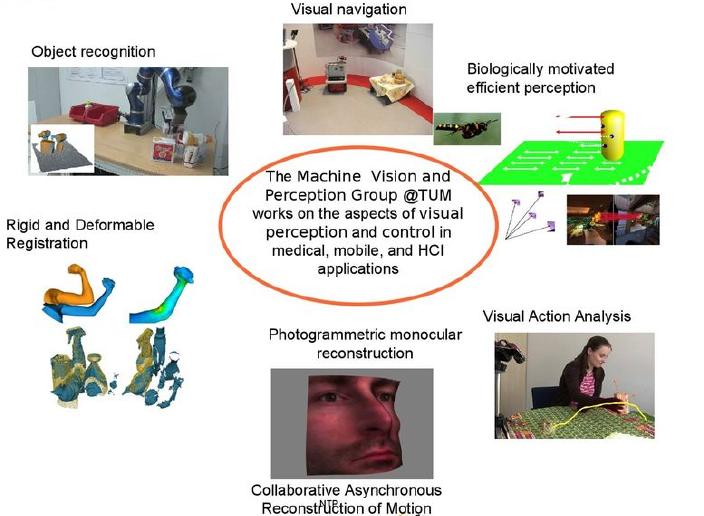
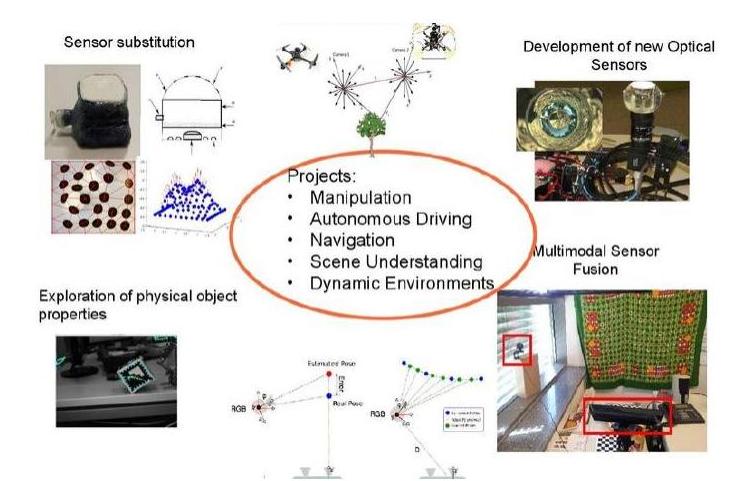
Welcome to MVP - Machine Vision and Perception Group
New Student Thesis and Projects
Motivated students wanted: New thesis and project options out!
For more information
see here!